Silnik krokowy to urządzenie elektromechaniczne, które zamienia energię elektryczną na moc mechaniczną. Jednocześnie silnik krokowy to bezszczotkowy silnik synchroniczny, który może podzielić pełny obrót na ogromną liczbę kroków. Gdy silnik krokowy jest zasilany impulsami elektrycznymi w odpowiedniej kolejności, wał lub wrzeciono silnika krokowego obraca się w dyskretnych krokach, umożliwiając precyzyjną kontrolę położenia silnika bez żadnego mechanizmu sprzężenia zwrotnego, o ile silnik jest dobrany do danego zastosowania.
1. Budowa silników krokowych
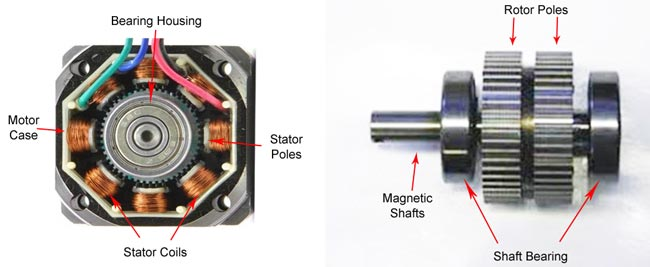
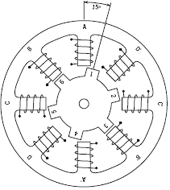
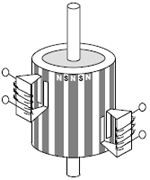
Silniki krokowe zazwyczaj składają się z przednich i tylnych zaślepek, łożysk, wału środkowego, rdzenia wirnika, rdzenia stojana, zespołu stojana, podkładek falistych, śrub i innych części. Dwiema głównymi częściami silnika krokowego są stojan i wirnik. Oba są wykonane z materiałów magnetycznych z odpowiednio sześcioma i czterema biegunami magnetycznymi. Sześć biegunów magnetycznych stojana ma na sobie uzwojenia sterujące, a dwa przeciwległe bieguny tworzą fazę.
2. Typy silników krokowych
Istnieją trzy podstawowe typy silników krokowych: wirnik reaktywny: silnik krokowy o zmiennej reluktancji (VR), wirnik aktywny: silnik krokowy z magnesami trwałymi (PM), połączenie VR i PM: Hybrydowy silnik krokowy (HY)
Silniki krokowe o zmiennej reluktancji
Silniki krokowe o zmiennej reluktancji są najprostszym typem silnika krokowego i składają się z wielozębnego wirnika z miękkiego żelaza i uzwojonego stojana. Oba bieguny są namagnesowane, gdy do uzwojenia stojana zostanie przyłożony prąd stały.
Gdy zęby wirnika zostaną przyciągnięte do naelektryzowanych biegunów stojana, następuje obrót. Ponieważ magnesy silników krokowych o zmiennej reluktancji są mniejsze i lżejsze niż magnesy silników krokowych z magnesami trwałymi, są one szybsze. Im mniejszy obszar między kołami zębatymi wirnika i stojana silnika krokowego o zmiennej rezystancji, tym mniejsza strata siły magnetycznej.
W przypadku tego typu silnika krokowego, mimo że konstrukcja jest prosta i łatwa do kontrolowania, rozdzielczość jest niska, a moment obrotowy niewielki.
Silniki krokowe z magnesami trwałymi
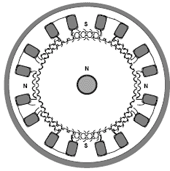
Magnesy trwałe są wbudowane w strukturę silnika krokowego z magnesami trwałymi. Zmiana położenia wirnika będzie spowodowana zmianą kierunku prądu w cewkach, zmieniając bieguny magnetyczne. Wirnik obróci się o 90°, gdy kierunek prądu zostanie odpowiednio zmieniony. Ten pojedynczy krok silnika, chociaż przydatny w niektórych zastosowaniach, byłby bardzo duży i niedokładny. Dlatego też faktycznie istniejące silniki z magnesami trwałymi mają więcej biegunów wirnika i kilka magnesów zamontowanych na wirniku, aby zwiększyć liczbę kroków i precyzję pozycjonowania.
Namagnesowane bieguny wirnika zapewniają większą intensywność strumienia magnetycznego, a w rezultacie silniki z magnesami trwałymi wykazują lepsze charakterystyki momentu obrotowego niż silniki krokowe o zmiennej reluktancji. Prosta konstrukcja skutkuje silnikiem o umiarkowanej cenie i dość niskiej rozdzielczości.
Silniki krokowe hybrydowe
Silniki krokowe hybrydowe są jednym z najczęściej używanych typów silników krokowych w branży. Silniki krokowe hybrydowe łączą najlepsze cechy silników krokowych o zmiennej reluktancji i silników krokowych z magnesami trwałymi, więc są droższe. Silniki krokowe hybrydowe oferują lepszą wydajność pod względem rozdzielczości kroków, momentu obrotowego i prędkości.
Rotor hybrydowego silnika krokowego składa się z magnesów trwałych, ale w przeciwieństwie do modeli omówionych powyżej, magnesy nie są zamontowane promieniowo, ale namagnesowane osiowo. Zwykle wirnik składa się z dwóch przeciwległych namagnesowanych pierścieni umieszczonych na wale silnika. Ma rowki szczelinowe w każdym pierścieniu, aby utworzyć zęby wirnika.
Liczbę pełnych kroków na obrót można obliczyć z następującego wzoru:
- SPR = NR x Ø
- Gdzie: SPR = liczba kroków na obrót
- NR = całkowita liczba zębów wirnika (suma dla obu jarzm)
- Ø = liczba faz silnika
- lub: NR = SPR/Ø
| Porównania | Silnik krokowy o zmiennej reluktancji (VR) | Silnik krokowy z magnesem trwałym (PM) | Silnik krokowy hybrydowy (HB) |
| Koszt | Średni | Względnie tani | Względnie drogi |
| Struktura projektu | Prosty | Średni | Względnie złożony |
| Rozdzielczość | Kąt kroku: 1,8°, 0,9° lub mniej | Kąt kroku: 3°~30° | Kąt kroku: 1,8°, 0,9° lub mniej |
| Krzywa prędkości momentu obrotowego | Brak znaczącego spadku momentu obrotowego przy dużej prędkości | Duży moment obrotowy przy małej prędkości, znaczny spadek momentu obrotowego przy dużej prędkości | Duży moment obrotowy przy małej prędkości, znaczny spadek momentu obrotowego przy dużej prędkości |
| Hałas | Więcej hałasu | Mniej hałasu | Więcej hałasu (lepiej z podziałem mikrokroków) |
| Generowanie ciepła | Wysoki wzrost temperatury (potrzebny radiator) | Niski wzrost temperatury | Niski wzrost temperatury |
| Podział mikrokroku | Zwykle działają tylko w pełnym kroku | Magnesy ferrytowe lub neodymowo-żelazowo-borowe | Magnesy neodymowo-żelazowo-borowe |
| Materiał wirnika | Blacha ze stali krzemowej (bez magnesów trwałych) | Pełny krok, półkrok, mikrokrok | Pełny krok, półkrok, mikrokrok |
| Powierzchnia wirnika | Wielozębna struktura na zewnętrznej powierzchni wirnika | Gładka i bezzębna | Wielozębna struktura na zewnętrznej powierzchni wirnika |
| Moment magnetyczny | Generuje tylko moment przyciągający | Zarówno moment przyciągający, jak i odpychający podczas pracy | Zarówno moment przyciągający, jak i odpychający podczas operacja |
3. Rodzaje okablowania
Inna klasyfikacja silników krokowych opiera się na rodzaju uzwojenia silnika dwufazowego. Silniki krokowe są klasyfikowane na silniki unipolarne i bipolarne na podstawie tej klasyfikacji.
Główną różnicą jest to, że silniki unipolarne działają z jedną polaryzacją prądu (napięcia), podczas gdy silniki bipolarne działają z dwiema polaryzacjami, co oznacza, że kierunek przepływu prądu w cewkach jest zmienny. Kolejną różnicą jest to, że cewki silnika muszą być połączone, aby przenieść moc z końca jednej cewki na początek drugiej. Ta metoda połączenia pozwala na użycie jednej polaryzacji prądu (napięcia). Silnik bipolarny ma wyższy moment obrotowy niż silnik unipolarny, ale jest również bardziej skomplikowany w sterowaniu.
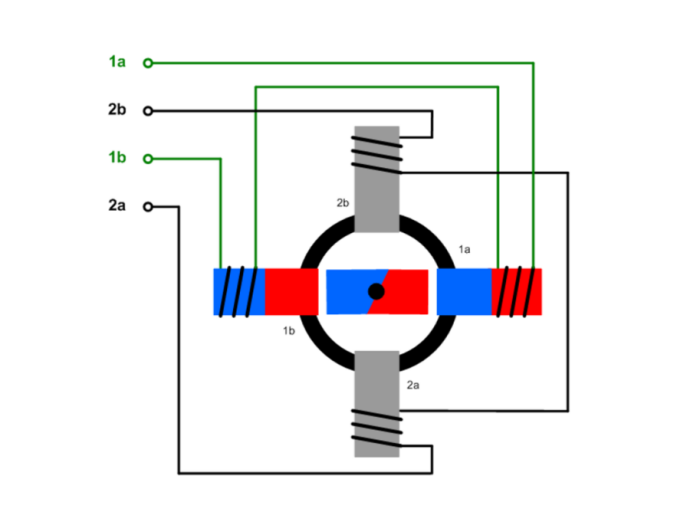
Silnik krokowy bipolarny i połączenie jego uzwojeń
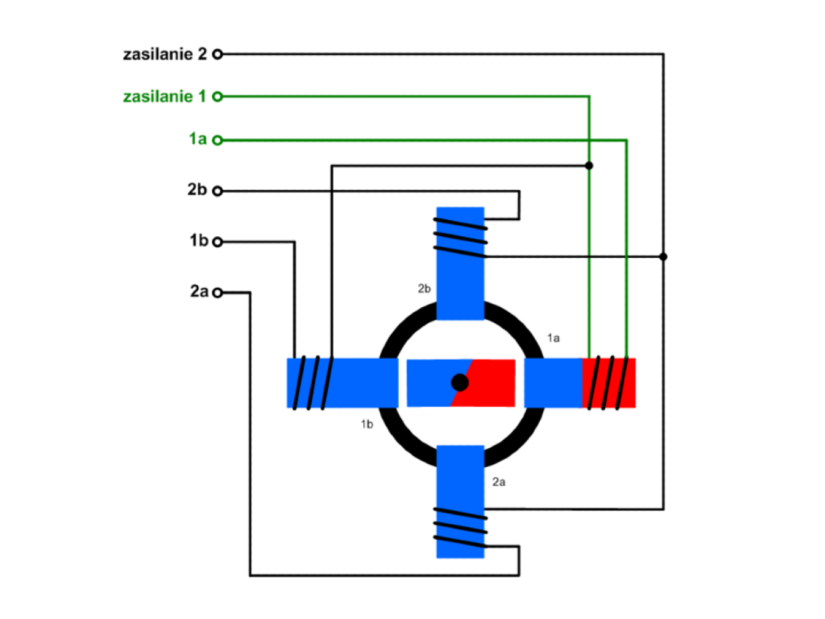
Silnik krokowy unipolarny i połączenie jego uzwojeń
| Silnik krokowy bipolarny | Silnik krokowy unipolarny |
| Wyższy moment obrotowy | Niższy moment obrotowy |
| Wyższe zakotwiczenie dzięki uzwojeniom | Niższe zakotwiczenie |
| Mniejszy | Większy |
| Tanier | Droższe |
| Bardziej skomplikowane sterowanie, wymagające płytki zawierającej etapy sterowania zasilaniem i narastaniem | Łatwiejsze sterowanie, wymagające tylko jednego obwodu zasilania |
4. Zalety silników krokowych
- Pozycjonowanie - Dzięki silnikom krokowym poruszającym się w precyzyjnych, powtarzalnych krokach, sprawdzają się dobrze w aplikacjach wymagających precyzyjnego pozycjonowania.
- Kontrola prędkości - Precyzyjne przyrosty ruchu zapewniają doskonałą kontrolę prędkości.
- Moment obrotowy przy niskiej prędkości - Silniki krokowe mają wysoki moment obrotowy przy niskich prędkościach.
5. Wady silników krokowych
- Niska wydajność — w porównaniu z silnikami prądu stałego zużywają więcej prądu. Dlatego mają tendencję do nagrzewania się.
- Ograniczony moment obrotowy przy dużej prędkości - Moment obrotowy silnika szybko spada wraz ze spadkiem prędkości
- Brak opinii — Opinia nie jest używana do określenia możliwych pominiętych kroków
- Wysoki poziom wibracji i hałasu - Przy bardzo dużych prędkościach obsługa tego silnika nie jest łatwa.
- Możliwa utrata synchronizacji - Spowodowana przez takie czynniki, jak nieoczekiwane zmiany obciążenia
- Mały stosunek momentu do bezwładności
- Wymagaj obwodu napędu
6. Do czego służą silniki krokowe?
Takie silniki krokowe są dobrym wyborem do zastosowań wymagających niskiej prędkości i wysokiej dokładności. Niektóre z tych codziennych zastosowań są wymienione poniżej:
Silniki krokowe do drukarek 3D
Silniki krokowe są prawie zawsze dostępne w popularnych drukarkach 3D. Zastosowanie silników krokowych w drukarkach 3D umożliwia bardzo dokładny ruch i pozycjonowanie bez konieczności stosowania enkoderów i innego dodatkowego oprogramowania lub czujników w opłacalny sposób. Silniki krokowe mogą przejść do znanego odstępu, a następnie utrzymać tę pozycję. Są dobrze przystosowanym silnikiem do przenoszenia obiektów w powtarzalne pozycje.
W zależności od typu drukarki są one używane w wielu różnych zastosowaniach. Na przykład silniki krokowe służą do indywidualnego poruszania ekstruderem lub budowania osi X, Y i Z platformy. Zespół ekstrudera ma również silnik krokowy, który służy do wciągania filamentu do ekstrudera i kontrolowania dostarczania spójnego, równego materiału do maszyny przez cały proces drukowania.
Silniki krokowe są dostępne w różnych rozmiarach. najczęściej używane rozmiary w drukarkach 3D to NEMA 14, NEMA 17, NEMA 23 i NEMA 24.
 Silniki krokowe do CNC
Silniki krokowe do CNC
Silniki krokowe są alternatywą dla serwosilników i mogą zasilać większość typów maszyn CNC. Silniki krokowe mają niewielkie rozmiary i prostą konstrukcję, dzięki czemu idealnie nadają się do małych zastosowań, takich jak frezarki CNC. Silniki krokowe kosztują mniej niż serwosilniki przy tej samej mocy, ale nowoczesne wersje silników krokowych często mają te same cechy. Silniki krokowe są łatwiejsze do zrozumienia i obsługi ze względu na brak enkoderów, a silniki krokowe są również bezszczotkowe i łatwe w utrzymaniu.
Silniki krokowe mogą zazwyczaj zapewniać prędkość posuwu od 50 do 1000 cali na minutę, podczas gdy serwomotory mogą osiągać ponad 2500 cali na minutę. Jeśli potrzebujesz bardzo wysokiej dokładności i dużych prędkości produkcyjnych, lepszym wyborem są serwomotory.
Do zastosowań, które nie wymagają ultrawysokiej precyzji. Większość frezarek CNC, które kosztują mniej niż 25 000 USD, wykorzystuje silniki krokowe, a nie serwomotory. Warto również wziąć pod uwagę silniki krokowe z zamkniętą pętlą, które dobrze zapobiegają błędom wynikającym z pominiętych kroków i mogą być dobrym wyborem, gdy potrzebujesz niedrogiego rozwiązania dla drogich przedmiotów.
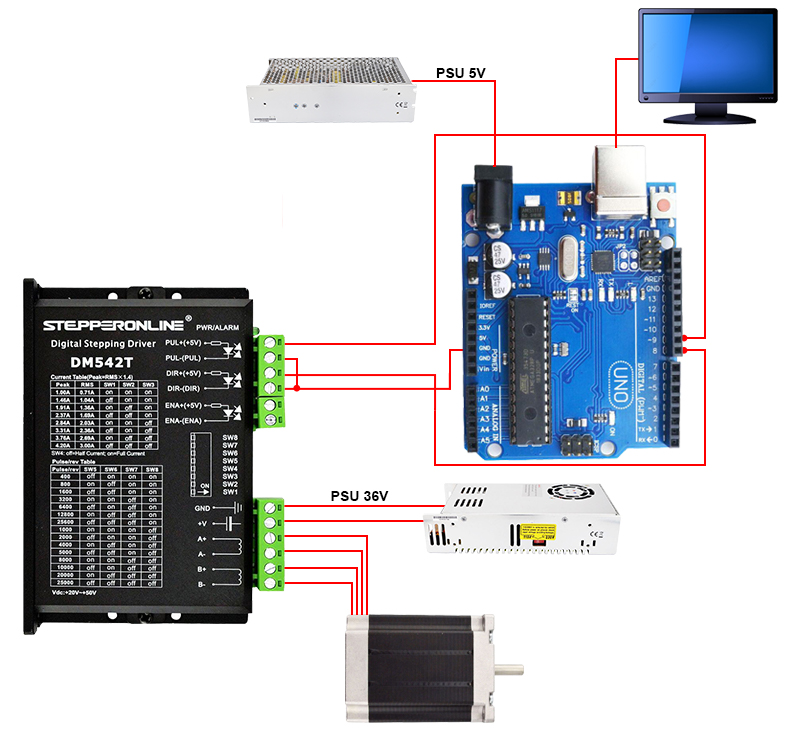
Silniki krokowe do Raspberry Pi, Arduino, MicroPython (np. pyboard, Wipy, ESP32, ESP8266 i MicroBit)
Silniki krokowe to niezwykle popularne urządzenia peryferyjne, które wykorzystuje się w komputerach jednopłytkowych, takich jak Raspberry Pi, Arduino itp., aby hobbyści mogli nauczyć się podstawowych umiejętności programowania komputerów. Często uważa się, że po nauczeniu się obsługi i sterowania małymi, niedrogimi silnikami krokowymi, kolejnym logicznym krokiem jest nauczenie się sterowania cyklami włączania/wyłączania diod LED i innymi prostymi przełącznikami lub typami brzęczyków.
W STEPPERONLINE dostępnych jest wiele typów silników krokowych do takich zastosowań, zaczynając od niezwykle niedrogich wersji 5 V, które łatwo podłącza się do złączy na płycie głównej Raspberry Pi.
Silniki krokowe dla robotyki
Silniki krokowe mogą być używane do sterowania ruchem, działając jako siłowniki, które aktywują stawy robota i mogą przyspieszać ładunek do żądanej prędkości.
Silniki krokowe do kamer
Silniki krokowe mają wiele zastosowań w wideografii kamer i są powszechnie używane do automatycznego ustawiania ostrości i powiększania obrazu w kamerach. Ponieważ silnik krokowy zapewnia płynne i precyzyjne sterowanie, pozwala on na minimalizację błędów w procesie wykrywania oraz zapewnia dokładne i płynne ustawianie ostrości w połączeniu z najnowszą technologią podglądu na żywo.
Silniki krokowe do domowych remontów
Silniki krokowe mają również wiele zastosowań w automatyzacji domów. Silniki krokowe są powszechnie stosowane do sterowania żaluzjami klimatyzacyjnymi, otwierania lub zamykania zaworów rurowych i sterowania zmechanizowanymi roletami okiennymi.